”stm32 避障小车 超声波 舵机“ 的搜索结果
舵机+超声波避障小车
舵机+超声波简介一.SG90舵机二.超声波数据处理 补充一下上一篇博客遗漏掉的一个问题,一般电机的PWM都是有一些频率限制的,而我的直流电机是10Khz来进行驱动的。 一.SG90舵机 这个是我买的舵机+超声波模块,这个...
STM32智能小车超声波避障+可燃性气体监测基于库函数程序源代码。 1、本程序采用KEIL软件开发。 2、用到的库文件:Keil.STM32F1xx_DFP.2.3.0.pack。 3、程序对应处理器:STM32F103C8T6(移植到其它STM321xx系列处理器...
该程序源代码用于STM32F103C8T6单片机前轮舵机转向智能小车超声波避障实验。 1、源代码开发软件:keil4; 2、程序对应处理器是:STM32F103C8T6; 3、智能小车电机驱动芯片是:L293D; 4、智能小车电机为:TT直流减速...
STM32超声波+舵机避障小车,小车通过舵机进行判断,实现可以根据实际路况进行避障,使得避障的成功性和可靠性大大提高。非常的好
该程序源代码用于STM32F103C8T6麦克纳姆轮(全向)智能小车超声波避障实验。 1、源代码开发软件:keil4; 2、程序对应处理器是:STM32F103C8T6; 3、智能小车电机驱动芯片是:L293D; 4、智能小车电机为:TT直流减速...

基于STM32的超声波避障小车
标签: 单片机
超声波避障小车原理就是通过给超声波模块超过10us的高电平信号,自动发送8个40KHZ的方波,来检测是不是有信号的返回,如果有信号的返回,那么就判断为前方有障碍物,并且通过舵机云台,来实现180度的旋转,检测左右...
基于stm32f103vc的智能小车源码,运用超声波传感器HC-SR04实现避障,实现控制CDS5516舵机的旋转。
STM32 舵机+超声波避障一.直流电机二.L298N模块 寒假由于时间较长,自己就想做一个智能车玩玩,第一个做的是蓝牙小车,不过比较简单,我就不打算具体另开一个部分,到时候挑一些与避障小车不一样的部分说一下。我这...

STM32智能小车超声波避障基于库函数程序源代码。 1、本程序采用KEIL软件开发。 2、用到的库文件:Keil.STM32F1xx_DFP.2.3.0.pack。 3、程序对应处理器:STM32F103C8T6(移植到其它STM321xx系列处理器也很方便)。 4...
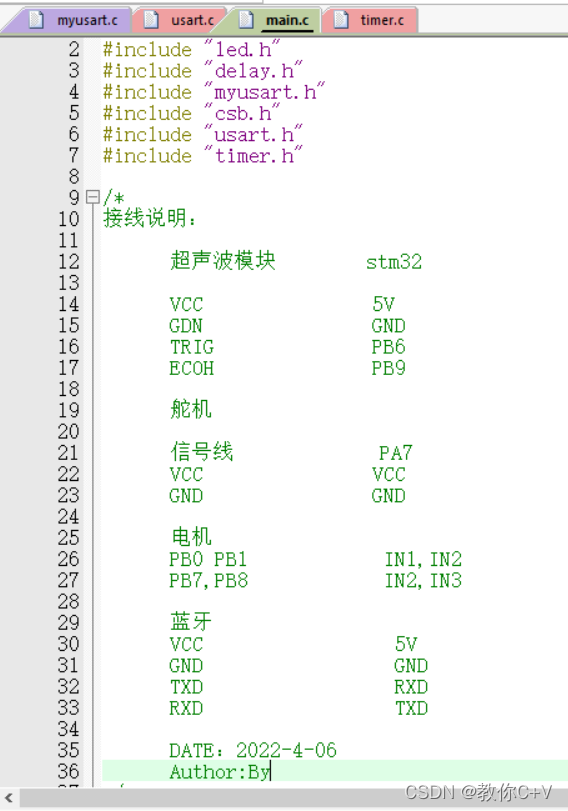
资源包括:程序,程序设计报告 ...思路:通过驱动超声波模块,测量出小车与障碍物之间的距离,并通过蓝牙反馈数据到手机,同时根据测量数据进行舵机的转动控制,从而实现智能避障(建议先看程序设计报告总结部分)
STM32智能小车超声波避障+温湿度监测基于库函数程序源代码。 1、本程序采用KEIL软件开发。 2、用到的库文件:Keil.STM32F1xx_DFP.2.3.0.pack。 3、程序对应处理器:STM32F103C8T6(移植到其它STM321xx系列处理器也很...
基于STM32/HAL库的超声波避障小车,SG90舵机云台+HC-SR04超声波模块,具体讲解请移步至我的主页
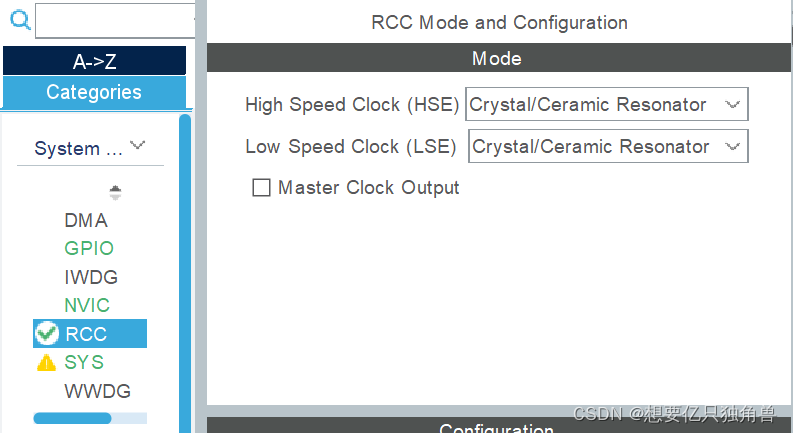
舵机sg90模块舵机SG90模块是一种小型舵机,适用于各种机器人和电子设备。...需要用到的知识: 定时器输出比较----pwm输出使用原理:在PWM周期20MS以内控制有效电平的时间即可控制舵机的转动角度超声波传感器。
这次我们选择TIM3的通道1输出PWM波,TIM3的通道1对应的是PA6,所以我们将舵机的信号线(黄色线)接到PA6,具体设置如图。舵机的控制,需要一个20ms的时基脉冲,控制高电平时间为0.5ms~2.5ms范围内即可控制舵机在0 ~ ...

stm32-超声波避障程序案例,循迹+壁障+遥控功能,蓝牙遥控


STM32智能小车红外避障+红外跟随+红外循迹+超声波避障基于库函数程序源代码。 1、本程序采用KEIL软件开发。 2、用到的库文件:Keil....按下K4按键:智能小车超声波避障运动。 11、本程序源代码在智能小车上亲测可用。

基于STM32F103C8T6的循迹+避障+蓝牙遥控智能小车 STM32C8t6控制器,使用蓝牙HC-06模块,使小车在循迹+避障+遥控功能的切换中运行流畅,解决了蓝牙串口发送数据延迟问题,超声波,舵机,电机三者的协调得比较好。
推荐文章
- c语言链表查找成绩不及格,【查找链表面试题】面试问题:C语言学生成绩… - 看准网...-程序员宅基地
- 计算机网络:20 网络应用需求_应用对网络需求-程序员宅基地
- BEVFusion论文解读-程序员宅基地
- multisim怎么设置晶体管rbe_山东大学 模电实验 实验一:单极放大器 - 图文 --程序员宅基地
- 华为OD机试真题-灰度图恢复-2023年OD统一考试(C卷)-程序员宅基地
- 【机器学习】(周志华--西瓜书) 真正例率(TPR)、假正例率(FPR)与查准率(P)、查全率(R)_真正例率和假正例率,查准率,查全率,概念,区别,联系-程序员宅基地
- Python Django 版本对应表以及Mysql对应版本_django版本和mysql对应关系-程序员宅基地
- Maven的pom.xml文件结构之基本配置packaging和多模块聚合结构_pom <packaging>-程序员宅基地
- Composer 原理(二) -- 小丑_composer repositories-程序员宅基地
- W5500+F4官网TCPClient代码出现IP读取有问题,乱码问题_w5500 ping 网络助手 乱码 send(sock_tcps,tcp_server_buff,-程序员宅基地